|
汽车智能化的发展,给原本就极为复杂的座舱设计也带来了新的挑战。座舱任务的多样化对人类的认知要求更高了。为了更好理解人机工程学和人的认知与行为,下面介绍几个理论模型,来帮助大家更好理解驾驶行为的特点。包括态势感知模型、基于技能-规则-知识的行为模型、多重资源理论、耶德定律等。
一、态势感知
态势感知最早用于飞行员的飞行场景,定义是“在一定时间和空间内对环境中的元素的感知,并对其意义的理解以及对它们在不久将来的状态预测”,也被认为是飞行员在飞行过程中对外部世界的内部认知模型。态势感知结构可以进一步分为三个层级,如下图所示:
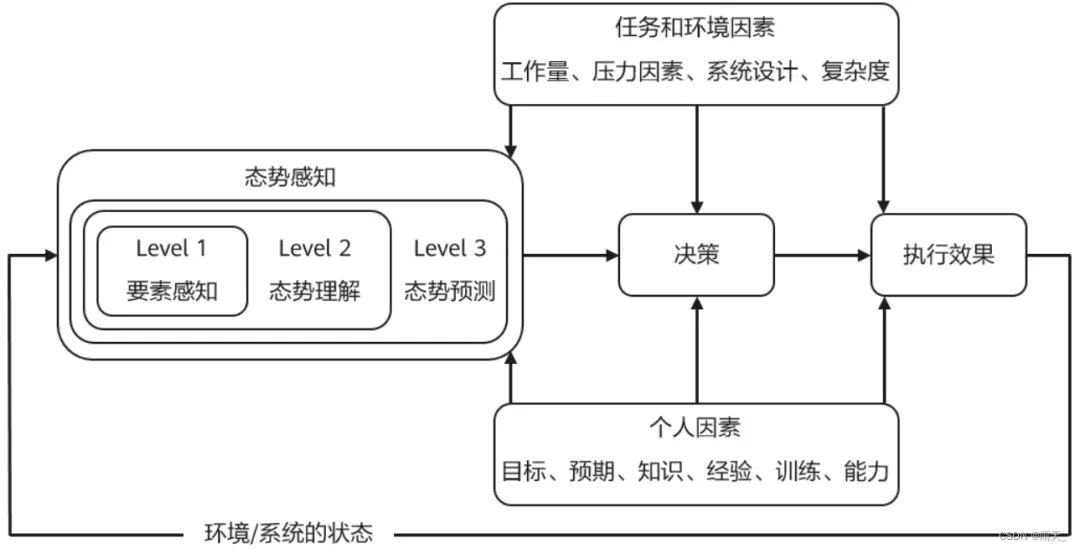
态势感知的三个层级,图片来源见水印
要素感知:感知环境中直观存在的某些元素及其特征,如山川河流的颜色大小面积等,这就构成态势感知的第一级;
态势理解:基于要素感知的基础上的理解,以及这些元素和其他元素通过格式塔的方式组合为不同模式时,构建出一幅想象的整体图景,以及理解到当前对象和事件的重要性,例如警告面板上的警示红灯,驾驶员理解红灯的出现可能会危及他的生命安全,这就构成态势感知的第二级;
态势预测:当有行驶中的汽车出现在特定的距离内时,预测这些汽车的未来行动能力,就构成了态势感知的第三级。
上图用于汽车驾驶中,能较好理解注意力缺失导致的问题。如当汽车开启了辅助驾驶模式,驾驶员正在玩手机或者看视频的时候,汽车需要驾驶员紧急接管,驾驶员在注意力缺失的情况下需要对当前环境、自身汽车和周围车辆状况等一系列因素进行感知、理解、预测、决策,最后再执行。极短时间内完成以上步骤很有可能让驾驶员出现认知负荷过载的情况,最后手忙脚乱导致悲剧发生,这就是为什么辅助驾驶需要驾驶员处于合理的情景意识。
任务和环境因素以及个人因素,都会直接影响态势感知、决策和执行效果,这两部分能用后面的耶德定律和SRK模型分别进行解释。总的来说,良好执行效果需要驾驶员处于良好的情景意识和恰当的唤醒度、注意力和认知负荷水平,同时对于驾驶员的驾驶技能有一定要求。
同理,在辅助驾驶过程中我们也需要驾驶员处于同等状态才能让驾驶员在突发情况时更好地完成接管,因此我们可以在辅助驾驶过程中通过听觉通道将重要信息实时告知驾驶员,并且在中控屏幕上显示最重要信息,以确保驾驶员能快速感知和理解当前状况并进入良好的预测和决策流程。
态势感知模型能让我们更好地理解驾驶员在人-机-环境中,是如何进行感知、理解、预测和决策,最终完成驾驶任务的。在智能座舱相关想HMI设计中,任何一个影响上述态势感知环节的设计,都会作用于最后的驾驶行为,从而对驾驶安全产生直接的影响。
二、基于技能-规则-知识的行为模型
基于技能-规则-知识的行为模型把人的工作根据认知参与的复杂度分为三种不同水平。
1.基于技能的操作:非常熟练的、几乎是潜意识的操作,不需要经过大脑的复杂思维过程,因此对人的认知负荷和注意力要求最低,如盲操;
2.基于规则的操作:了解各种规则,当事情发生时,按照各种规则来操作。保持车道不压线、遵守红绿灯等交通规则就属于此类操作;
3.基于知识的操作:问题相对比较复杂,解决的过程需要大量的知识、分析和判断。因此对人的认知负荷和注意力要求最高。
通过上述的SRK模型,我们就能理解为何新手司机开车非常谨慎,而老司机却可以在开车过程中同时处理其他事情,因为老司机对驾驶这一系列操作已经非常熟悉,甚至可以通过肌肉记忆完成,所以不需花费太多注意力在路面上。但对于新手司机来说,驾驶车辆仍处于知识层面的操作,驾驶时需要花费更多注意力在路面、眼睛和手脚之间的配合以及如何操控车辆上。
三、多重资源理论
多任务处理在开车过程中很常见,我们会一边聊天,一边观察路面变化,一边听周围的其他声音信号等。之所以能同时进行几种活动,是因为这些活动所要求的注意容量没有超负荷。若在行人拥挤的街道上开车,大量的视觉和听觉刺激占用了我们的注意力,我们就很难再同时进行多种活动了。
当然,车内多任务并行并不提倡,例如一边开车一边玩手机或者注视中控屏幕,因为人的注意力和认知负荷是有限的,如果超出人的注意容量很容易引起人的失误,从而导致交通事故。
那为什么驾驶员可以做到边看边听?从多重资源理论的角度来看,人会通过多资源和多通道去理解和处理信息,而且每项资源或通道都有自己的容量,当信息不超出该容量时不容易超出人的认知负荷。
多重资源理论在智能座舱体验设计上能给我们带来很多指导意义,例如一些紧急信息最好通过听觉通道传达给驾驶员,而不是通过视觉通道,因为这能有效避免驾驶员的认知负荷超载。
但是为什么我们会经常把一些信息显示在屏幕上呢?这不是和前者结论矛盾吗?多重资源理论结合SRK模型能解释为什么部分老司机能边开车边看屏幕甚至看手机,而新手司机却不能。因为老司机在驾驶时对路面的观察和理解不占用太多视觉和认知容量,所以他们有更多的容量去处理其他事物,但对于新手司机来说光是观察路面就已经让他们的认知资源接近容量上限甚至超载,所以他们必须很谨慎地驾驶才能避免发生事故。
从这个角度来看,由于视觉信息在表达上更直观,只要显示信息不会过多而且难以理解,在驾驶过程中通过屏幕显示信息不一定对所有驾驶员产生重大影响。
四、耶德定律
在心理学里,耶德定律用于描述唤醒度(Arousal)高低与绩效之间的关系,如图下图所示。
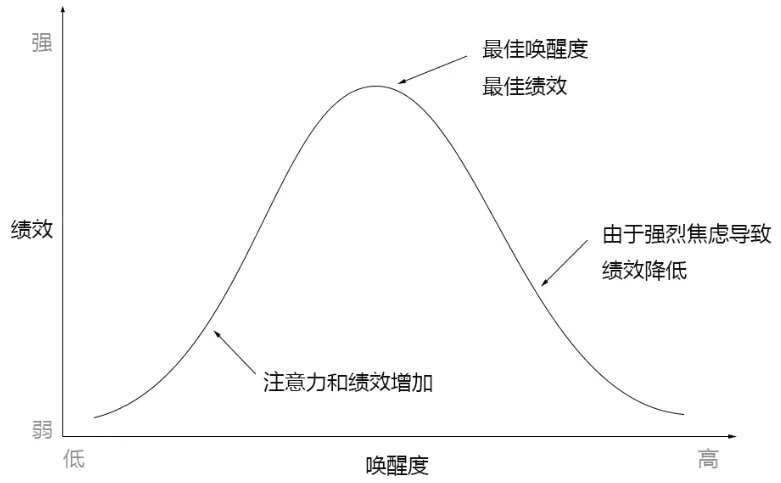
唤醒度与最佳绩效水平
唤醒度可以反映人当前的生理和心理状态,从生理角度唤醒度由低到高可以依次描述为犯困、疲劳、松弛、正常、焦虑、压力大和疼痛,它和压力(Stress)、注意力(Attention)、警觉性(Alertness)、认知负荷(Cognitive Load)和工作负荷(Workload)等因素有着强联系。
从上图中我们可以发现存在着一个最佳的绩效唤醒水平区域,太少或太多的唤醒都会对任务绩效产生不利影响。当唤醒度过低时,例如在犯困到松弛的区间下,人的注意力是缺失的,边开车边看手机可以理解为驾驶员在驾驶任务上处于松弛状态,所以他此时的绩效并不处于最佳状态。
当唤醒度过高时,例如在焦虑到疼痛的区间下,人的注意力会处于分散甚至过载状态。在这个区间内怎么理解注意力分散甚至过载?焦虑、压力大甚至疼痛会让人过度紧张导致注意力无法集中到该集中的任务上,例如新手司机在学习或者实习期会遇到由于紧张导致“脑子里一片空白”,其实这是在描述注意力分散甚至过载。
五、总结
人机信任也属于人机工程学正在探索的领域。人机信任的研究更多关注机器系统的因素,主要包括机器能力与机器特性两个方面。机器能力相关的人机信任影响因素主要包括人机系统的可靠性、可预测性、异常故障等,大量研究表明在复杂的交互任务中,高度可靠的自动人机系统会促进操作者信任,但是也可能导致用户监视行为的减少及过度依赖。
可预测性是指人机系统来执行任务符合用户期望的程度,当用户可以依据经验预测系统的表现时,人机信任会持续在较高水平,而可预测性差的人机系统会使信任水平迅速下降。人机系统的异常故障对人机信任有负面影响,即使故障恢复后信任恢复也比较缓慢,且不会达到以前的信任水平。
与机器特性相关的人机信任影响因素主要包括系统的自动化等级、物理特征、系统透明度等因素。自动化等级或智能化水平越高的机器系统,初始的人机信任程度越高,但当其出错时,人机信任会迅速降低并持续处于较低水平,原因在于系统自动化等级越高可理解性及可预测性越差,一旦出错就会导致人机信任水平持续降低。
信任的交互将增强操作自动驾驶/辅助驾驶的司机的信心,改进其对车辆的控制以及提升安全感,我们需要将司机对车的信任限制在一个适度的等级,过度信任和不信任都会影响驾驶安全。
在智能座舱领域,人类和机器的关系是:当人对机器不信任时,在辅助驾驶过程中会一直担心汽车出现问题,从而产生焦虑感和注意力分散,对机器越不信任对变化的响应会越迟钝;当人对机器过度信任时,在辅助驾驶过程中会太过依赖汽车的决策,渐渐地注意力分散到其他事情上。
这两种现象都不是我们希望看到的,因此什么是合理的人机信任以及如何校准人机信任将是设计辅助驾驶时很重要的课题。
| 






